Workflow
From first block to final firmware.
Modeloop covers the whole journey: design algorithms visually, assemble them, test their behavior, and deploy to your hardware.

01 · Design
Design your components.
Bring your architecture to life on a modern visual canvas. Build every software component by wiring blocks, state machines and calibration parameters
Start designing free02 · Write
Edit it as text.
Prefer typing? Every component can be edited two ways: as blocks on the canvas or as MDL text. Change one, and the other follows.
Read about MDL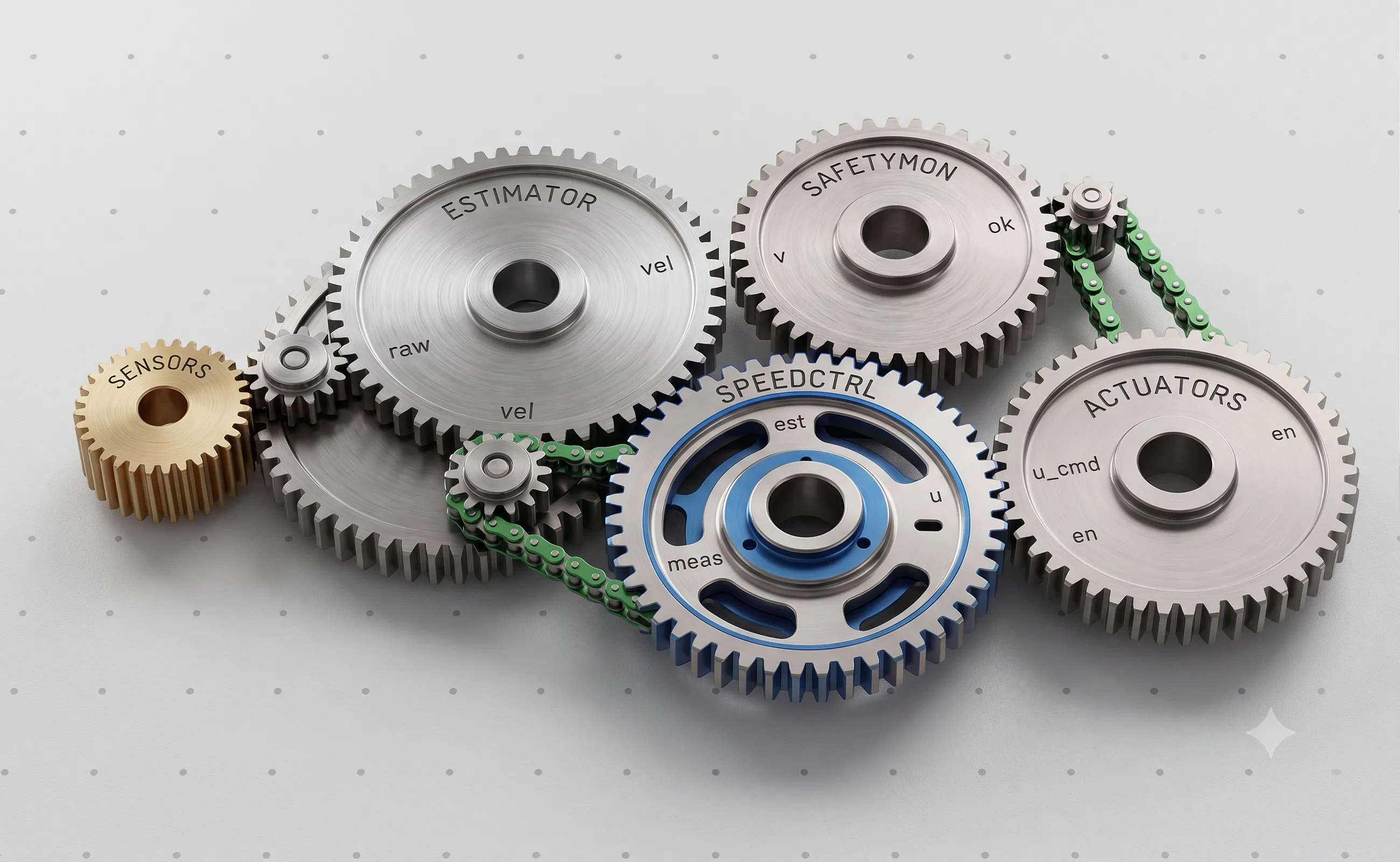
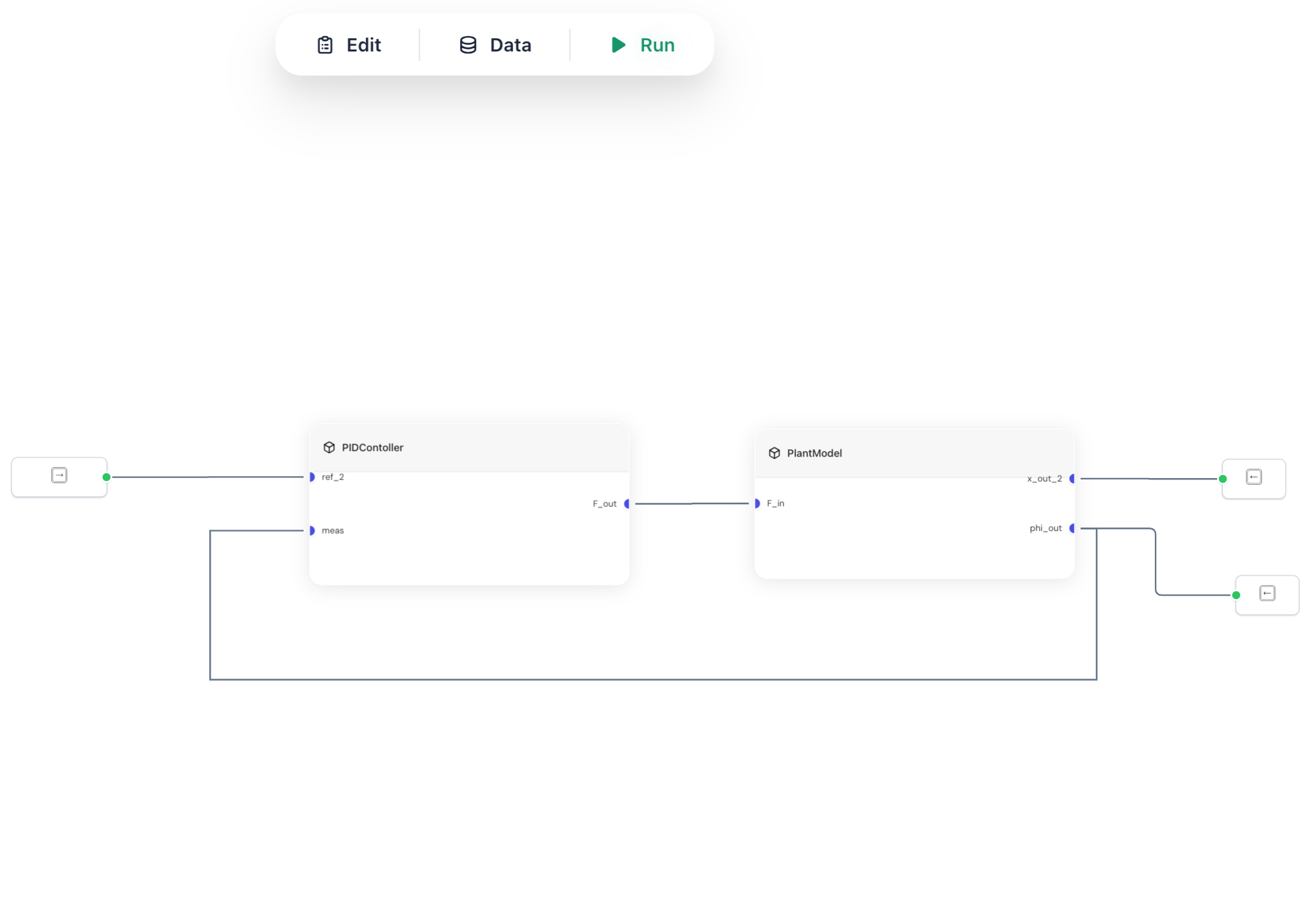
03 · Assemble
Assemble them into a system.
Wire your components together. Simulate the whole system and inspect every trace before touching the hardware.
Build your first system04 · Test
Test before hardware.
Define model tests, run verification workflows and inspect results while the system is still easy to change.
Test your first model
05 · Deploy
Deploy to hardware.
Connect board resources and peripherals to your components. Your firmware is now ready to be deployed.
Deploy your first modelModeloop capabilities
Compose hierarchical block diagrams. Wrap any subsystem into a single reusable block.
Embed hierarchical StateCharts directly in your signal flow — every transition visualized.
Every block diagram is strictly associated with a mathematical representation, guaranteeing correct C code generation by design.
Write unit tests and run simulations to validate the functional correctness of your model.
Run your model and inspect every signal trace in real time
Start Designing Today
No install required. Open your browser and build your first system.
Join the waitlist for early desktop access
You're in! Unlock early access.
Invite 3 engineers → jump the queue.
0/3 invited